Le localisateur de défaut DSFL


Pourquoi un localisateur de défaut ?
Les protections, quelles soient de distance, différentielles, à comparaison de phases permettent d’éliminer les défauts situés sur les lignes. Cependant elles ne permettaient pas une localisation précise des défauts, ce qui pouvait retarder la reprise de service en cas de défaut permanent.
Il a donc été décidé, dans le courant des années 2000, d’équiper des lignes importantes pour la sûreté du système électrique de dispositifs plus précis pour mieux cibler les visites de lignes.
Dans un but d’efficacité, les résultats de la localisation du défaut sont télérelevables.
Dans cet article, nous allons examiner un localisateur de défaut qui utilise une méthode d’échométrie à deux équipements : les DSFL (Distribution System Fault Locator).
Généralités sur la méthode
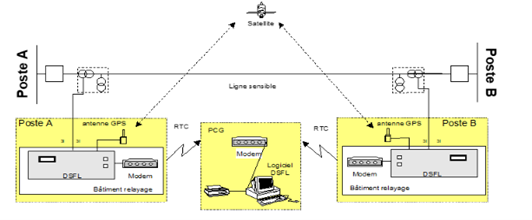
Ce système de localisation, de type échométrie, s’appuie sur un logiciel qui exploite les informations issues de 2 localisateurs de défaut DSFL installés à chaque extrémité de la ligne à surveiller et synchronisés par GPS.
La qualification a été validée par RTE en 2007.
Principe de la détermination de la position du défaut.
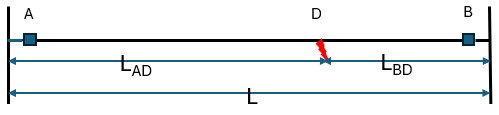
L’apparition du défaut en D, à l’instant T0, génère une onde de choc qui se propage vers les deux extrémités de la ligne à une même vitesse V proche de la vitesse de la lumière dans le vide.
Sur le schéma ci dessus, on peut noter la position D du défaut, L la longueur de la ligne entre AB, LAD la longueur de la ligne entre A et D , LBD la longueur de la ligne entre B et D
L’onde de choc va être détectée par les combinés de mesure en A à TA =T0 + (LAD/V) et en B à TB=T0 + (LBD/V)
L’écart de temps entre la réception de l’onde de défaut est TA-TB
TA-TB = (LAD – LBD) / V, et comme LBD =L- LAD, Cela donne TA-TB= (LAD -(L- LAD)) /V = (2LAD-L) / V
D’où :
LAD = L/2+((TA-TB)x V)/2 et LBD = L/2+((TB-TA)x V)/2
Grâce à la datation par GPS les temps TA et TB sont connus avec une précision d’une microseconde, ce qui donne une précision de localisation d’environ 300 mètres.
Architecture matérielle
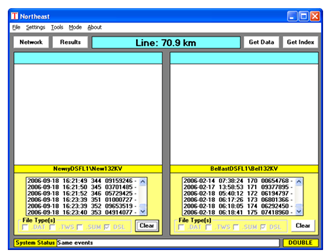
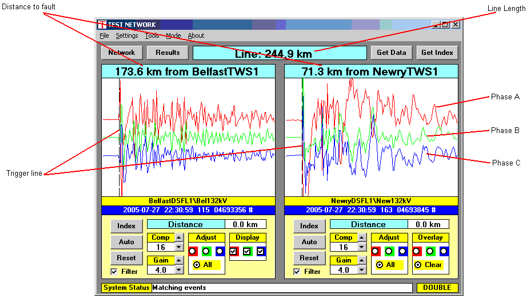
Les résultats
Le localisateur de défaut stocke deux types de données : les fichiers index et les fichiers d’enregistrements (la forme d’onde).
Un fichier index est sauvegardé pour chaque ligne. Il contient les marqueurs horaires à une résolution de 0.1µs pour les 500 derniers évènements. Lorsque le nombre d’évènements dépasse 500, les nouveaux évènements prennent les places des plus anciens (FIFO).
Un enregistrement est sauvegardé pour chaque évènement. Il représente les transitoires des signaux sur les 3 phases, échantillonnées à 1.25MHz pendant une durée de 11ms (1ms avant l’évènement et 10 ms après).
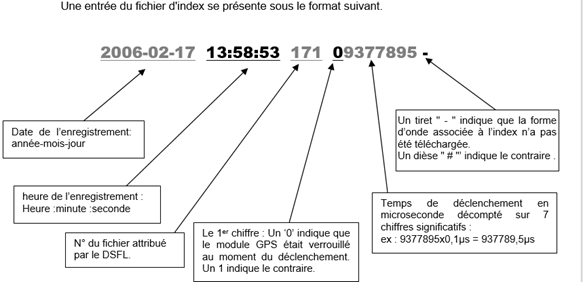
Le fichier index
Le fichier enregistrement
En s’appuyant sur le fichier enregistrement on peut visualiser les formes d’ondes et les analyser.
Par Jean R La question de l’élimination des courts-circuits (appelés souvent « défauts » par les exploitants de réseaux électriques) se pose depuis le début de l’utilisation de l’électricité. Un court-circuit provoque habituellement une augmentation du courant électrique, (jusqu’à plusieurs dizaines de milliers d’ampères) ainsi qu’une baisse de la tension. S’il n’est pas…

Par Alain S. Photo de la structure métallique support d’antennes télécom située sur l’immeuble EDF de la Part Dieu surnommée le « LEM » du fait de sa ressemblance avec le module lunaire de la NASA. Les traboules sont, à Lyon, des passages piétons à travers des cours d’immeuble qui permettent de se rendre d’une…

Par Jean R Les réseaux électriques sont en majeure partie aérien et de ce fait soumis à de nombreuses « agressions » climatiques (foudre, pluie, givre…) ou liées à l’activité humaine (engins de chantiers, parapentes, cannes à pêche…) qui peuvent entraîner des courts-circuits (« défauts » dans le jargon des exploitants de réseau). L’exploitation du réseau génère également le…
Par Henri T Un court rappel concernant le réglage de la fréquence du réseau électrique Un court rappel concernant le réglage de la fréquence du réseau électrique La mission des télécommunications. Les transmissions des informations s’effectuent en analogique selon la norme EDF entrée/sortie ( – 5 mA, 0, + 5 mA ) tant pour le…

Par Jean R. La notion de « Plan de protection » apparaît formellement au début des années 1970 avec la définition par EDF d’un système de protection adapté au développement du réseau 400kV, à l’arrivée des centrales nucléaires et au déploiement des postes sous enveloppe métallique nécessitant des temps d’élimination des défauts très courts (typiquement…
Par Michel P Maquette du Commutateur STROWGER exposée à TransfOdyssée C’est le premier commutateur téléphonique qui a permis d’établir, sans l’aide d’une opératrice, une conversation entre deux abonnés d’un central téléphonique. Son inventeur est Almon Brown STROWGER (1839-1902), né le 19/10/1839 à New-York. Après avoir exercé le métier de professeur d’école, il devient propriétaire d’une…