Un acteur essentiel pour la sûreté du système : Le régleur.
Par Christian H.
On met souvent en avant les progrès technologiques de l’appareillage, plus précis, plus rapide, plus fiable au fur et à mesure de l’avancée du temps et c’est vrai, mais c’est aussi faire peu de cas d’une personne essentielle : Le régleur.
Son rôle initial était d’effectuer les réglages des protections et des automates, c’est-à-dire trouver les paramètres à introduire dans les protections et les automates pour que ceux-ci répondent au mieux en fonction des situations rencontrées sur le terrain. Schémas réseaux utilisés par le dispatching, types de défauts (monophasé, biphasé à la terre ou non, triphasé), niveaux de PCC possibles, présence de piquages, de productions autonomes, sensibilité des clients raccordés… On le voit, les paramètres sont multiples et trouver les compromis des réglages peut demander, au-delà d’une bonne connaissance électrotechnique une grande expérience de terrain.
Si la phase du calcul est bien documentée, elle nécessite un contrôle systématique, afin de la confirmer, de l’enrichir voire de la corriger ou de détecter des écarts de fonctionnement des matériels par rapport à leurs spécifications. Son domaine s’est donc rapidement élargi :
- Aux phases de conception d’ouvrage, pour une déclinaison du plan de protection et pour une aide à la configuration des protections et automates, de plus en plus nombreux.
- Au domaine de l’analyse d’incident, pour une analyse systématique du comportement du système de protections et automates sur tous les événements réseau. constituant ainsi un retour d’expérience, fondamental pour la sûreté du système et pour l’activité réglage.
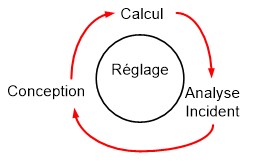
Calcul des paramètres de réglage
Objectif des réglages
Les protections contre les courts-circuits équipant le système de protection doivent mettre hors tension l’ouvrage affecté par un défaut d’isolement, sélectivement (c’est à dire en ne mettant hors tension que le minimum d’ouvrages nécessaires à l’élimination du défaut) et le plus rapidement possible afin de limiter les répercussions sur la clientèle, le matériel, ou le système de production.
Les automates équipant le système de protection doivent, garantir la sureté de fonctionnement du système de protection (Défaillance Disjoncteur …), la sécurité d’exploitation vis-à-vis des tiers (Surcharge …), doivent permettre d’assurer une reprise de service automatique (Réenclenchement…), et doivent suivant les doctrines mettre hors tension (Cas de manque Tension…) ou agir sur d’autres ouvrages (Automate de zone…)
Le but est d’une manière générale d’être conforme aux exigences des différents plans de protection sur le plan des performances et de la sécurité de fonctionnement, en tenant compte des particularités locales concernant la structure des réseaux THT et HT.
Principe de base
L’action des protections sur les disjoncteurs d’un ouvrage en défaut, doit être le résultat de la localisation la plus précise du défaut, et dépendra des principes de mesure utilisés.
Ainsi, si le défaut est bien localisé sur un ouvrage, le déclenchement des disjoncteurs sera le plus rapide possible. Si au contraire le défaut n’est pas localisé avec suffisamment de précision (Un doute existe pour savoir si le défaut est bien sur l’ouvrage concerné ou sur un ouvrage adjacent), le déclenchement des disjoncteurs sera retardé, pour laisser l’action d’isolement à l’ouvrage réellement affecté (voir l’illustration sur un cas de défaut ci-après). Le calcul des paramètres de réglage est donc basé sur un principe de sélectivité spatiale, suivant une orientation coordonnée, associé éventuellement, à une sélectivité temporelle.
Illustration sur deux exemples
Cas Protection de distance
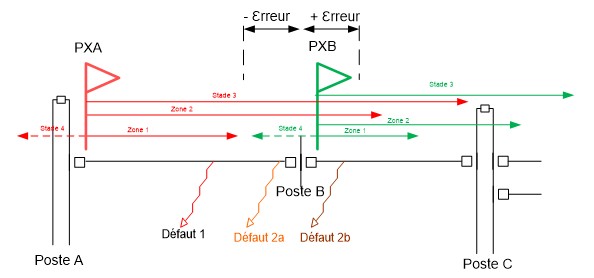
Vu du poste A, pour la PXA, avec les marges d’incertitude (-Ɛrreur), le Défaut 1 est bien positionné sur l’ouvrage AB, la sélectivité spatiale est garantie, l’ordre de déclenchement sera quasi instantané.
Vu du poste A, pour la PXA, avec les marges d’incertitude (+ Ɛrreur), le Défaut 2 peut être positionné en 2a ou 2b, l’ordre de déclenchement en A sera retardé, laissant par sélectivité temporelle, l’action de la PXA s’accomplir pour le défaut en 2a, ou celle quasi instantanée de la PXB pour le défaut en 2b, dans ce dernier cas, par la retombée de la PXA, la liaison AB reste en service, maintenant sous-tension le poste B depuis le poste A.
Pour information les stades 3 et 4 constituent des secours, agissant sur des intervalles de temps plus longs, (orientation : stade 3 dans le sens Aval ; stade 4 dans le sens Amont)
Cas Protection différentielle de ligne
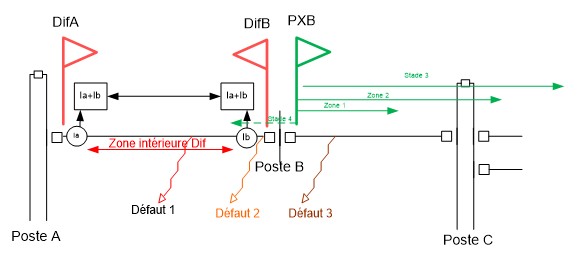
Par principe de mesure, tout défaut dans la zone intérieure Dif, (Ia+Ib ≠ 0,) est précisément localisé sur l’ouvrage, la sélectivité spatiale est garantie, le déclenchement sera instantané.
Pour le Défaut 2 ou Défaut 3, la localisation sera dans la zone extérieure Dif, (Ia+Ib =0), donc sans action sur les disjoncteurs. Une protection de distance complémentaire assurera, en secours, l’élimination.